




Trending
Opinion: How will Project 2025 impact game developers?
The Heritage Foundation's manifesto for the possible next administration could do great harm to many, including large portions of the game development community.
Featured Blog | This community-written post highlights the best of what the game industry has to offer. Read more like it on the Game Developer Blogs or learn how to Submit Your Own Blog Post
This article gives an introduction to ray tracing API in Diligent Engine by the example of a simple physics-based rendering application.

Hardware-accelerated ray tracing was one of the most innovative additions to the next-generation APIs (Direct3D12 and Vulkan) of the recent years. It unlocks a wide range of algorithms that are impossible or very tricky to implement in a traditional rasterization pipeline. However, ray tracing API in both Direct3D12 and Vulkan is quite involved and is not always easy to follow.
Diligent Engine is a modern cross-platform low-level graphics library and rendering framework that supports multiple rendering backends including Direct3D12 and Vulkan. Please refer to this article for the introduction to this project. In a most recent release, Diligent Engine enabled support of hardware-accelerated ray-tracing through a common easy-to-use yet fully exhaustive API. Ray tracing shaders authored in HLSL will work in both backends without any special tricks or hacks. Shaders written in GLSL as well as compiled SPIRV bytecode can also be used in Vulkan backend.
This article gives an introduction to ray tracing API in Diligent Engine by the example of a simple application that simulates physics-based light transport in a scene to render soft shadows, multiple-bounce reflections and refractions, and dispersion.
In a traditional rendering pipeline, triangles are processed by a number of programmable and fixed-function stages and are eventually projected and rasterized over the regular pixel grid. The final color is formed by a pixel shader and a number of optional blending operations. This is a very efficient and high-performance method, but performance comes for the price of a number of limitations. First, the pixel shader can only be invoked for the predefined sample locations (which enables GPUs to parallelize the execution very efficiently). Second, the GPU does not have access to the whole scene and only triangles visible by the camera are processed.
Ray tracing removes these limitations. Unlike the rasterization, it allows application to query scene properties at any location by casting a ray in any direction and running a specified shader at the intersection point.
Unlike rasterization, where objects do not require any pre-processing and can be thrown into the pipeline rightaway, things are a bit more complicated in ray tracing. Since a ray can be cast in any direction, the GPU must have an efficient way of intersecting the ray with the entire scene. This way is provided by acceleration structures that typically encompass some kind of bounding volume hierarchies.
There are two types of acceleration structures (AS) in ray tracing API: bottom-level AS, and top-level AS. Bottom-level acceleration structure (BLAS) is where the actual geometry resides. Top-level acceleration structure is a set of references to one or more BLASes. One TLAS may reference multiple instances of the same BLAS with different transformations. BLASes are more expensive to build or update than TLASes. The two-level structure is a trade-off between the ability to update the AS at run-time and ray tracing efficiency. For example, object animation can be implemented by updating instance transformations in the TLAS without the need to rebuild BLASes that represent animated objects.
There are two types of geometries that a BLAS can contain: triangle geometry or procedural. Triangle geometry is represented by a conventional set of vertices and indices. Procedural geometry requires an application to define a special type of shader that determines how a ray intersects the object. That shader can implement any custom algorithm, but is more expensive than a built-in ray-triangle intersection test.
A single BLAS may contain only one type of geometry: either triangles or axis-aligned bounding boxes (AABBs) that define the basic procedural object shape.
In this example we will be using two types of objects: a cube and a sphere. The cube will be defined by a triangle geometry, while the sphere will be defined as a procedural geometry. The cube data will be accessed through a uniform buffer (rather than traditional vertex/index buffers), so that a closest hit shader can read triangle properties (position, normal, UVs) for any primitive.
For our cube BLAS, we specify a single triangle geometry with 24 vertices and 12 primitives. The BLAS will allocate space that is enough for this geometry description:
const float3 CubePos[24] = /* ... */; const uint Indices[36] = /* ... */; BLASTriangleDesc Triangles; Triangles.GeometryName = "Cube"; Triangles.MaxVertexCount = _countof(CubePos); Triangles.VertexValueType = VT_FLOAT32; Triangles.VertexComponentCount = 3; Triangles.MaxPrimitiveCount = _countof(Indices) / 3; Triangles.IndexType = VT_UINT32; BottomLevelASDesc ASDesc; ASDesc.Name = "Cube BLAS"; ASDesc.Flags = RAYTRACING_BUILD_AS_PREFER_FAST_TRACE; ASDesc.pTriangles = &Triangles; ASDesc.TriangleCount = 1; m_pDevice->CreateBLAS(ASDesc, &m_pCubeBLAS);
Note that in this example, GeometryName member is not used anywhere else except in BLAS build. In other cases, however, the geometry name may be used to change the geometry data using the BLAS update operation. Geometry name may also be used in a shader binding table as described below.
The cube BLAS is now created, but contains no data: we need to initialize it. For that, we will need to create regular vertex and index buffers, with the only difference that we will use the BIND_RAY_TRACING flag to allow access to the buffers during the BLAS build operation. All buffers which are used in the BLAS or TLAS build commands must be created with BIND_RAY_TRACING flag. The GPU needs some scratch space to perform the build operation and keep temporary data, which must be provided to BuildBLAS command. Call m_pCubeBLAS->GetScratchBufferSizes() to get the minimal scratch buffer size.
BLASBuildTriangleData TriangleData; TriangleData.GeometryName = Triangles.GeometryName; TriangleData.pVertexBuffer = pCubeVertexBuffer; TriangleData.VertexStride = sizeof(CubePos[0]); TriangleData.VertexCount = Triangles.MaxVertexCount; TriangleData.VertexValueType = Triangles.VertexValueType; TriangleData.VertexComponentCount = Triangles.VertexComponentCount; TriangleData.pIndexBuffer = pCubeIndexBuffer; TriangleData.PrimitiveCount = Triangles.MaxPrimitiveCount; TriangleData.IndexType = Triangles.IndexType; TriangleData.Flags = RAYTRACING_GEOMETRY_FLAG_OPAQUE; BuildBLASAttribs Attribs; Attribs.pBLAS = m_pCubeBLAS; Attribs.pTriangleData = &TriangleData; Attribs.TriangleDataCount = 1; Attribs.pScratchBuffer = pScratchBuffer; m_pImmediateContext->BuildBLAS(Attribs);
Note that GeometryName member of BLASBuildTriangleData struct instance must match the geometry name used in BLASTriangleDesc. When BLAS contains multiple geometries, this is how triangle data is mapped to the specific geometry in the BLAS.
Creating BLAS for procedural sphere is performed in a similar fashion.
Top-level acceleration structure represents the entire scene and consists of multiple BLAS instances.
To create a TLAS, we only need to specify the number of instances it will contain:
TopLevelASDesc TLASDesc; TLASDesc.Name = "TLAS"; TLASDesc.MaxInstanceCount = NumInstances; TLASDesc.Flags = RAYTRACING_BUILD_AS_ALLOW_UPDATE | RAYTRACING_BUILD_AS_PREFER_FAST_TRACE; m_pDevice->CreateTLAS(TLASDesc, &m_pTLAS);
Additional flags tell the system how the structure will be used by the application:
RAYTRACING_BUILD_AS_ALLOW_UPDATE flag allows the TLAS to be updated after it has been created with different instance transformations;
RAYTRACING_BUILD_AS_PREFER_FAST_TRACE flag tells the GPU to make some optimization to improve ray tracing efficiency, for the price of extra build time.
Similar to BLAS, a new TLAS contains no data and needs to be built. To build a TLAS, we need to prepare an array of TLASBuildInstanceData structs, where every element will contain the instance data:
Instances[0].InstanceName = "Cube Instance 1"; Instances[0].CustomId = 0; // texture index Instances[0].pBLAS = m_pCubeBLAS; Instances[0].Mask = OPAQUE_GEOM_MASK; Instances[1].InstanceName = "Cube Instance 2"; Instances[1].CustomId = 1; // texture index Instances[1].pBLAS = m_pCubeBLAS; Instances[1].Mask = OPAQUE_GEOM_MASK; AnimateOpaqueCube(Instances[1]); ... Instances[5].InstanceName = "Sphere Instance"; Instances[5].CustomId = 0; // box index Instances[5].pBLAS = m_pProceduralBLAS; Instances[5].Mask = OPAQUE_GEOM_MASK; Instances[6].InstanceName = "Glass Instance"; Instances[6].pBLAS = m_pCubeBLAS; Instances[6].Mask = TRANSPARENT_GEOM_MASK;
The InstanceName member is used in TLAS update operation to match the instance data to the previous instance state and is also used in the shader binding table to bind the shader hit groups to the instances.
Hit shader can query the instance index in the array via InstanceIndex() function. CustomId
member is specified by the user and is passed to the hit shader via InstanceID() function.
CustomId may be used to apply different materials to each instance with the same geometry.
Mask can be used to group instances and trace rays only against selected groups (e.g. shadow rays vs primary rays).
For each instance, we can specify a transformation matrix with the rotation and translation, e.g.:
Instances[6].Transform.SetTranslation(3.0f, 4.0f, -5.0f);
Updating the instance transformation during the TLAS update operation is much faster than
updating BLAS with vertex transformation or using the transform buffer.
To build/update TLAS, we need to prepare an instance of BuildTLASAttribs struct:
BuildTLASAttribs Attribs; Attribs.HitGroupStride = HIT_GROUP_STRIDE; Attribs.BindingMode = HIT_GROUP_BINDING_MODE_PER_INSTANCE;
HitGroupStride is the number of different ray types. In this example we use two ray types: primary and shadow. You may add more ray types, e.g. a secondary ray that uses simplified hit shaders for reflected rays.
BindingMode is the hit group location calculation mode. In our example we will be assigning different hit groups to different instances, so we use the HIT_GROUP_BINDING_MODE_PER_INSTANCE mode. If an application needs more control, it can use HIT_GROUP_BINDING_MODE_PER_GEOMETRY mode to assign indiviudal hit group to each geometry within every instance. On the other hand, it can use HIT_GROUP_BINDING_MODE_PER_TLAS mode to assign the same hit group to all geometries in all instances.
The actual TLAS instance data is stored in an instance buffer. The required size per one instance is fixed and is given by TLAS_INSTANCE_DATA_SIZE constant (64 bytes).
Similar to BLAS build operation, the GPU requires a scratch buffer to keep temporary data.
The required scratch buffer sizes for building and updating is given by m_pTLAS->GetScratchBufferSizes() method.
Attribs.pInstances = Instances; Attribs.InstanceCount = _countof(Instances); Attribs.pInstanceBuffer = m_InstanceBuffer; Attribs.pScratchBuffer = m_ScratchBuffer; Attribs.pTLAS = m_pTLAS; m_pImmediateContext->BuildTLAS(Attribs);
Ray-tracing pipeline state object is more complex than a graphics or a compute pipeline as there may be multiple shaders of the same type in one shader stage. This is required so that the GPU can run different shaders when hitting different objects.
Similar to other pipeline types, we start by creating all shaders that will be used by the ray tracing pipeline. Diligent Engine allows using HLSL for both D3D12 and Vulkan backends. The minimum HLSL shader model that supports ray tracing is 6.3. Only the new DirectX compiler (DXC) supports shader model 6.0+, and we need to explicitly specify it:
ShaderCI.ShaderCompiler = SHADER_COMPILER_DXC; ShaderCI.HLSLVersion = {6, 3}; ShaderCI.SourceLanguage = SHADER_SOURCE_LANGUAGE_HLSL;
To create a ray tracing PSO, we need to define an instance of RayTracingPipelineStateCreateInfo struct:
RayTracingPipelineStateCreateInfo PSOCreateInfo; PSOCreateInfo.PSODesc.PipelineType = PIPELINE_TYPE_RAY_TRACING;
The main component of a ray tracing pipeline is a set of shader groups.
There are three group types:
General shader group that contains a single ray generation, ray miss or callable shader.
Triangle hit group that contains a closest hit shader and an optional any-hit shader.
Procedural hit group that contains an intersection shader and optional closest hit and any-hit shaders.
Our ray-tracing pipeline will contain the following hit groups:
const RayTracingGeneralShaderGroup GeneralShaders[] = { {"Main", pRayGen}, {"PrimaryMiss", pPrimaryMiss}, {"ShadowMiss", pShadowMiss} }; const RayTracingTriangleHitShaderGroup TriangleHitShaders[] = { {"CubePrimaryHit", pCubePrimaryHit}, {"GroundHit", pGroundHit}, {"GlassPrimaryHit", pGlassPrimaryHit} }; const RayTracingProceduralHitShaderGroup ProceduralHitShaders[] = { {"SpherePrimaryHit", pSphereIntersection, pSpherePrimaryHit}, {"SphereShadowHit", pSphereIntersection} }; PSOCreateInfo.pGeneralShaders = GeneralShaders; PSOCreateInfo.GeneralShaderCount = _countof(GeneralShaders); PSOCreateInfo.pTriangleHitShaders = TriangleHitShaders; PSOCreateInfo.TriangleHitShaderCount = _countof(TriangleHitShaders); PSOCreateInfo.pProceduralHitShaders = ProceduralHitShaders; PSOCreateInfo.ProceduralHitShaderCount = _countof(ProceduralHitShaders);
Besides the hit groups, we must define a few additional fields:
PSOCreateInfo.RayTracingPipeline.MaxRecursionDepth = MaxRecursionDepth; PSOCreateInfo.RayTracingPipeline.ShaderRecordSize = 0; PSOCreateInfo.MaxAttributeSize = max(sizeof(/*BuiltInTriangleIntersectionAttributes*/float2), sizeof(ProceduralGeomIntersectionAttribs)); PSOCreateInfo.MaxPayloadSize = max(sizeof(PrimaryRayPayload), sizeof(ShadowRayPayload));
MaxRecursionDepth specifies the number of recursive calls that an application may make in ray tracing shaders. Zero means that only ray generation shader may be executed. 1 means that ray generation shader may spawn rays that will not be allowed to generate another rays. 2 means that closest hit shaders of the rays spawned by the ray generation shader will also be allowed to generated secondary rays, etc.
MaxRecursionDepth field is used by the driver to allocate the required stack size. An application should manually control the recursion depth and must not exceed the specified limit to avoid driver crashes. The maximum allowed value for this field is 31.
ShaderRecordSize can be used to specify constants for each shader or instance or geometry, the maximum supported size is 4096 bytes minus the shader handle size (32 bytes).
MaxAttributeSize and MaxPayloadSize are only used in DirectX 12 backend. These values should be as small as possible to minimize the memory usage.
When everything is ready, we call CreateRayTracingPipelineState to create the PSO:
m_pDevice->CreateRayTracingPipelineState(PSOCreateInfo, &m_pRayTracingPSO);
Another key component of the ray tracing setup is the Shader Binding Table (SBT) that is used to
connect the instances in the TLAS with the shaders in ray tracing PSO that will be executed when a ray hits a particular instance. SBT must be created with the same pipeline that will be used with the trace rays command.
To create an SBT, we define an instance of ShaderBindingTableDesc struct and call CreateSBT()
device method:
ShaderBindingTableDesc SBTDesc; SBTDesc.Name = "SBT"; SBTDesc.pPSO = m_pRayTracingPSO; m_pDevice->CreateSBT(SBTDesc, &m_pSBT);
After the SBT is created, we start making shader associations. The first shader we need to bind is the ray generation shader, which is the entry point for the ray tracing pipeline, and is very similar to a compute shader.
m_pSBT->BindRayGenShader("Main");
Notice that "Main" is the name of the general shader group that contains the ray generation shader that we used in our ray tracing PSO.
Next, we bind miss shaders. A miss shader is executed if a ray doesn't hit any object. We use different behavior for primary and shadow rays and thus have two miss shaders:
m_pSBT->BindMissShader("PrimaryMiss", PRIMARY_RAY_INDEX); m_pSBT->BindMissShader("ShadowMiss", SHADOW_RAY_INDEX );
Again, "PrimaryMiss" and "ShadowMiss" are the names that we associated with the miss shaders when created the PSO. The second parameter to BindMissShader function is the miss shader index: 0 for primary rays, and 1 for shadow rays.
Next, we define a set of hit shaders for different TLAS instances:
m_pSBT->BindHitGroupForInstance(m_pTLAS, "Cube Instance 1", PRIMARY_RAY_INDEX, "CubePrimaryHit" ); m_pSBT->BindHitGroupForInstance(m_pTLAS, "Cube Instance 2", PRIMARY_RAY_INDEX, "CubePrimaryHit" ); m_pSBT->BindHitGroupForInstance(m_pTLAS, "Cube Instance 3", PRIMARY_RAY_INDEX, "CubePrimaryHit" ); m_pSBT->BindHitGroupForInstance(m_pTLAS, "Cube Instance 4", PRIMARY_RAY_INDEX, "CubePrimaryHit" ); m_pSBT->BindHitGroupForInstance(m_pTLAS, "Ground Instance", PRIMARY_RAY_INDEX, "GroundHit" ); m_pSBT->BindHitGroupForInstance(m_pTLAS, "Glass Instance", PRIMARY_RAY_INDEX, "GlassPrimaryHit" ); m_pSBT->BindHitGroupForInstance(m_pTLAS, "Sphere Instance", PRIMARY_RAY_INDEX, "SpherePrimaryHit");
The first argument of BindHitGroupForInstance() method is the TLAS object that contains the instance.The second argument is the instance name for which the hit group will be bound. These names must match the names we gave to the instances when created the TLAS. The third argument is the ray type (aka ray offset) in the shader binding table. The hit groups above are defined for the primary ray, so we use the PRIMARY_RAY_INDEX type. The last argument is the hit group name that was defined in TriangleHitShaders array during the pipeline initialization.
For shadow rays, we disable all hit shader invocation by using nullptr. We use BindHitGroupForTLAS method to bind empty shader for all instances for shadow ray type at once:
m_pSBT->BindHitGroupForTLAS(m_pTLAS, SHADOW_RAY_INDEX, nullptr);
Procedural sphere, though, requires some special care: we need to provide the intersection shader so that the GPU knows how to intersect the rays with our procedural object. Closest hit shader is not needed, so we will use the "SphereShadowHit" hit group that only contains the intersection shader:
m_pSBT->BindHitGroupForInstance(m_pTLAS, "Sphere Instance", SHADOW_RAY_INDEX, "SphereShadowHit");
Note that a TLAS can be created with BindingMode = HIT_GROUP_BINDING_MODE_PER_GEOMETRY flag, in which case hit groups can be individually specified for each geometry in every instance, for example:
m_pSBT->BindHitGroupForGeometry(m_pTLAS, "Cube Instance 1", "Cube", PRIMARY_RAY_INDEX, "CubePrimaryHit" );
The resulting SBT will contain the following data:
Location | Instance | Geometry | Ray type | Shader group |
|---|---|---|---|---|
0 | Cube Instance 1 | Cube | primary | CubePrimaryHit |
1 | shadow | empty | ||
2 | Cube Instance 2 | Cube | primary | CubePrimaryHit |
3 | shadow | empty | ||
4 | Cube Instance 3 | Cube | primary | CubePrimaryHit |
5 | shadow | empty | ||
6 | Cube Instance 4 | Cube | primary | CubePrimaryHit |
7 | shadow | empty | ||
8 | Ground Instance | Cube | primary | GroundHit |
9 | shadow | empty | ||
10 | Glass Instance | Cube | primary | GlassPrimaryHit |
11 | shadow | empty | ||
12 | Sphere Instance | Box | primary | SpherePrimaryHit |
Shader group identifiers (as well as shader constants that we don't have in our example) is what is actually stored in the SBT. Other fields in the table are used to calculate the data location.
Unlike others pipelines, in the ray tracing pipeline we use multiple shaders with the same type. Resources with the same name in shaders with the same type are considered the same resource.
They must be defined identically, e.g.:
// in closest_hit_shader1: // OK - shader register is ignored and will be remapped ConstantBuffer<CubeAttribs> g_CubeAttribsCB : register(b0); // in closest_hit_shader2: // OK - shader register is ignored and will be remapped ConstantBuffer<CubeAttribs> g_CubeAttribsCB : register(b1);
Note that shader registers assigned by the compiler or shader developer are ignored and will
be remapped by the engine.
It is an error to have different resource types with the same name in different shaders in
the same shader stage, e.g.:
// in closest_hit_shader1: ConstantBuffer<CubeAttribs> g_CubeAttribs; // in closest_hit_shader2: // ERROR - g_CubeAttribs is already defined as constant buffer // in another closest hit shader StructuredBuffer<CubeAttribs> g_CubeAttribs;
To fix the error above, rename one of the shader variables to have a distinct name.
It is OK to have different resource types with the same name in different shader stages:
// in closest_hit_shader: ConstantBuffer<CubeAttribs> g_CubeAttribs; // in any_hit_shader: // OK - namespaces for different shader types // do not overlap StructuredBuffer<CubeAttribs> g_CubeAttribs;
Other than the specifics above, creating an SRB and binding shader resources is done similar
to other pipeline types:
m_pRayTracingPSO->CreateShaderResourceBinding(&m_pRayTracingSRB, true); m_pRayTracingSRB-> GetVariableByName(SHADER_TYPE_RAY_GEN, "g_ConstantsCB")-> Set(m_ConstantsCB); m_pRayTracingSRB-> GetVariableByName(SHADER_TYPE_RAY_CLOSEST_HIT, "g_ConstantsCB")-> Set(m_ConstantsCB);
Before starting the ray tracing, we animate instances by updating their transformations in the TLAS.
Updating acceleration structures is much faster and takes less memory than building them from scratch.
UpdateTLAS();
Ray tracing is started by TraceRays device context method. The method takes the ray grid dimensions and the SBT as parameters:
TraceRaysAttribs Attribs; Attribs.DimensionX = m_pColorRT->GetDesc().Width; Attribs.DimensionY = m_pColorRT->GetDesc().Height; Attribs.pSBT = m_pSBT; Attribs.SBTTransitionMode = RESOURCE_STATE_TRANSITION_MODE_TRANSITION; m_pImmediateContext->TraceRays(Attribs);
In this example we generate one ray per screen pixel, so DimensionX and DimensionY are the
render target dimensions.
Then the result of ray tracing is copied to the swapchain image using a simple graphics pipeline.
In a more complex renderer this pass will be replaced by tone mapping or other post processing effects.
Ray generation shader is the entry point of the ray tracing pipeline. Its purpose is to generate the primary rays. To generate rays for every screen pixel, we will first calculate the four rays that bound the planes of the view frustum.
We start by extracting the view frustum planes from the view-projection matrix using ExtractViewFrustumPlanesFromMatrix() function. We then normalize the planes and calculate the intersections. We then pass the resulting four rays to the shader:
ViewFrustum Frustum; ExtractViewFrustumPlanesFromMatrix(CameraViewProj, Frustum, false); // Normalize frustum planes. for (uint i = 0; i < ViewFrustum::NUM_PLANES; ++i) { Plane3D& plane = Frustum.GetPlane(static_cast<ViewFrustum::PLANE_IDX>(i)); float invlen = 1.0f / length(plane.Normal); plane.Normal *= invlen; plane.Distance *= invlen; } // Calculate the ray formed by the intersection of two planes. auto GetPlaneIntersection = [&Frustum](ViewFrustum::PLANE_IDX lhs, ViewFrustum::PLANE_IDX rhs, float4& result) { const Plane3D& lp = Frustum.GetPlane(lhs); const Plane3D& rp = Frustum.GetPlane(rhs); const float3 dir = cross(lp.Normal, rp.Normal); const float len = dot(dir, dir); result = dir * (1.0f / sqrt(len)); }; GetPlaneIntersection(ViewFrustum::BOTTOM_PLANE_IDX, ViewFrustum::LEFT_PLANE_IDX, m_Constants.FrustumRayLB); GetPlaneIntersection(ViewFrustum::LEFT_PLANE_IDX, ViewFrustum::TOP_PLANE_IDX, m_Constants.FrustumRayLT); GetPlaneIntersection(ViewFrustum::RIGHT_PLANE_IDX, ViewFrustum::BOTTOM_PLANE_IDX, m_Constants.FrustumRayRB); GetPlaneIntersection(ViewFrustum::TOP_PLANE_IDX, ViewFrustum::RIGHT_PLANE_IDX, m_Constants.FrustumRayRT);
In the ray generation shader, we calculate the normalized texture coordinates uv and use them to calculate the ray direction from frustum rays:
struct Constants { float4 Position; float4 FrustumRayLT; float4 FrustumRayLB; float4 FrustumRayRT; float4 FrustumRayRB; ... }; ConstantBuffer<Constants> g_ConstantsCB; ... float3 rayOrigin = g_ConstantsCB.CameraPos.xyz; float2 uv = (float2(DispatchRaysIndex().xy) + float2(0.5, 0.5)) / float2(DispatchRaysDimensions().xy); float3 rayDir = normalize(lerp( lerp(g_ConstantsCB.FrustumRayLB.xyz, g_ConstantsCB.FrustumRayRB.xyz, uv.x), lerp(g_ConstantsCB.FrustumRayLT.xyz, g_ConstantsCB.FrustumRayRT.xyz, uv.x), uv.y));
Next, we prepare the RayDesc struct and call CastPrimaryRay helper function:
RayDesc ray; ray.Origin = rayOrigin; ray.Direction = rayDir; ray.TMin = g_ConstantsCB.ClipPlanes.x; ray.TMax = g_ConstantsCB.ClipPlanes.y; PrimaryRayPayload payload = CastPrimaryRay(ray, /*recursion number*/0);
CastPrimaryRay() ray function calculates the final color of a pixel on the screen and generates secondary rays for reflection and refraction.
It wraps the TraceRay() HLSL intrinsic function for reusability. CastPrimaryRay() is defined as follows:
RaytracingAccelerationStructure g_TLAS; PrimaryRayPayload CastPrimaryRay(RayDesc ray, uint Recursion) { PrimaryRayPayload payload = {float3(0, 0, 0), 0.0, Recursion}; if (Recursion >= g_ConstantsCB.MaxRecursion) { // set pink color for debugging payload.Color = float3(0.95, 0.18, 0.95); return payload; } TraceRay(g_TLAS, // Acceleration structure RAY_FLAG_NONE, ~0, // Instance inclusion mask - all // instances are visible PRIMARY_RAY_INDEX, // Ray contribution to hit // group index (aka ray type) HIT_GROUP_STRIDE, // Multiplier for geometry // contribution to hit group index // (aka the number of ray types) PRIMARY_RAY_INDEX, // Miss shader index ray, payload); return payload; }
Note that we check the ray recursion depth and terminate it if current depth exceeds the maximum depth. It is essential to do this because the GPU does not automatically stop ray tracing when the maximum recursion depth is reached and will crash if we exceed the limit specified during the PSO initialization.
The images below show the effect of changing the recursion depth:

Recursion depth = 1: only first-hit surfaces are hanled.

Recursion depth = 2: reflections, shadows, and some refractions are handled.

Recursion depth = 3: shadows and cube reflection can be seen in the sphere; more refractions in the cube are visible.
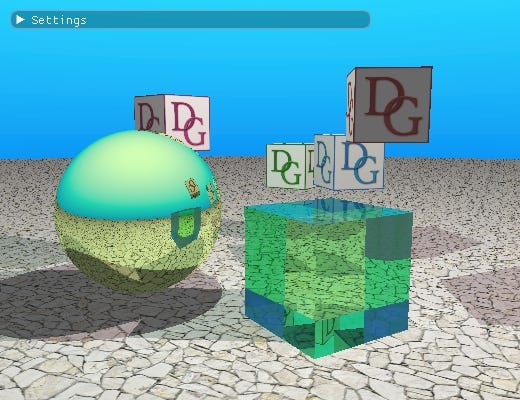
Recursion depth = 4: more reflections and refractions.

Recusrion depth = 8: if you look carefully, you will still be able to find some regions where rays have been terminated before hitting opaque surface or the sky.
At the end of the ray generation shader, we write the payload color to the output UAV texture:
g_ColorBuffer[DispatchRaysIndex().xy] = float4(payload.Color, 1.0);
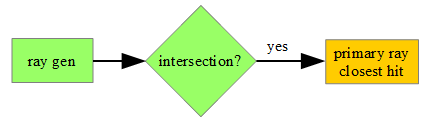
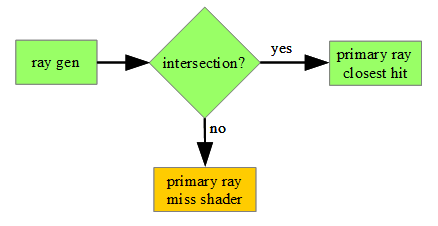
The closest hit shader is executed when a ray hits a triangle geometry or when a custom intersection shader reports the hit.
The following image shows the workflow for the primary ray closest hit shader:
The closest hit shader takes geometry intersection information and the editable ray payload as inputs:
[shader("closesthit")] void main(inout PrimaryRayPayload payload, in BuiltInTriangleIntersectionAttributes attr)
To compute the attributes of the hit point, we will use the 3-component barycentric coordinates:
float3 barycentrics = float3(1.0 - attr.barycentrics.x - attr.barycentrics.y, attr.barycentrics.x, attr.barycentrics.y);
The built-in PrimitiveIndex() function gives us the index of the current primitive. Using this index, we can read the 3 vertex indices from the cube constant data buffer:
uint3 primitive = g_CubeAttribsCB.Primitives[PrimitiveIndex()].xyz;
We then use the barycentric coordinates to calculate the texture coordinates at the intersection point:
float2 uv = g_CubeAttribsCB.UVs[primitive.x].xy * barycentrics.x + g_CubeAttribsCB.UVs[primitive.y].xy * barycentrics.y + g_CubeAttribsCB.UVs[primitive.z].xy * barycentrics.z;
Similarly, we get the triangle normal. Note though that we need to apply the object-to-world transformation that is given by ObjectToWorld3x4() intrinsic function:
float3 normal = g_CubeAttribsCB.Normals[primitive.x].xyz * barycentrics.x + g_CubeAttribsCB.Normals[primitive.y].xyz * barycentrics.y + g_CubeAttribsCB.Normals[primitive.z].xyz * barycentrics.z; normal = normalize(mul((float3x3) ObjectToWorld3x4(), normal));
In ray tracing, Texture2D::Sample() method is not supported because the GPU can not implicitly calculate derivatives, so we have to calculate the texture mipmap level manually or provide explicit gradients for anisotropic filtering. In this example we don't do that and just sample the finest mip level for simplicity:
payload.Color = g_Texture[InstanceID()].SampleLevel(g_SamLinearWrap, uv, 0).rgb;
The last step is lighting calculation. We use built-in functions to get the ray parameters and calculate the intersection point.
float3 pos = WorldRayOrigin() + WorldRayDirection() * RayTCurrent(); LightingPass(payload.Color, pos, normal, payload.Recursion + 1);
We then cast a ray to test if the light is occluded or not and apply a simple diffuse lighting:
void LightingPass(inout float3 Color, float3 Pos, float3 Norm, uint Recursion) { float3 col = float3(0.0, 0.0, 0.0); for (int i = 0; i < NUM_LIGHTS; ++i) { float NdotL = max(0.0, dot(Norm, rayDir)); // Don't trace rays if NdotL <= 0 if (NdotL > 0.0) { RayDesc ray; // Add a small offset to avoid self-intersections. ray.Origin = Pos + Norm * 0.001; ray.Direction = normalize(g_ConstantsCB.LightPos[i].xyz - Pos); // Limit max ray length by distance to light source. ray.TMax = distance(g_ConstantsCB.LightPos[i].xyz, Pos); ray.TMin = 0.0; col += CastShadow(ray, Recursion).Shading * NdotL * Color * g_ConstantsCB.LightColor[i].rgb; } } Color = col / float(NUM_LIGHTS) + g_ConstantsCB.AmbientColor.rgb; }
Note that in the code snippet above we cast only a single shadow ray. The example application casts multiple rays towards the light to caluclate soft shadow. See the source code for more details.
For shadow rays, we use a new payload type, ShadowRayPayload that only contains two components to minimize the memory usage.
To improve ray tracing performance, we use the following flags:
RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH - stop ray processing immediately if any geometry hit is encountered;
RAY_FLAG_FORCE_OPAQUE - skip any-hit shader invocation.
In SBT, we bind null hit group for shadow ray for triangle geometry. For procedural geometry we use the intersection shader only, so we don't have any closest hit shaders anyway, and RAY_FLAG_SKIP_CLOSEST_HIT_SHADER flag may have no effect in our particular case. However, if we used the same hit groups for shadow rays as for the primary rays, we might have seen a significant performance improvement.
We use an instance mask OPAQUE_GEOM_MASK to skip transparent cube with refractions.
Light calculation for objects with refractions is much more complex and is ignored for shadows.
The initial Shading value is set to 0 meaning that the object is completely shadowed. It will be preserved if any intersection is found, but will be overwritten by 1 in the miss shader, indicating no occlusion.
The CastShadow() function is defined as follows:
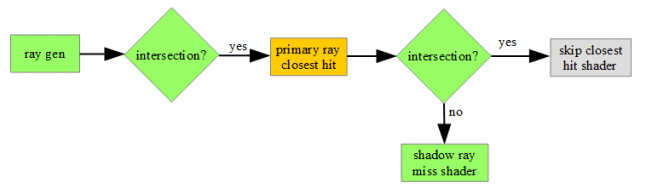
ShadowRayPayload CastShadow(RayDesc ray, uint Recursion) { ShadowRayPayload payload = {0.0, Recursion}; if (Recursion >= g_ConstantsCB.MaxRecursion) { payload.Shading = 1.0; return payload; } TraceRay(g_TLAS, // Acceleration structure RAY_FLAG_FORCE_OPAQUE | RAY_FLAG_SKIP_CLOSEST_HIT_SHADER | RAY_FLAG_ACCEPT_FIRST_HIT_AND_END_SEARCH, OPAQUE_GEOM_MASK, // Instance inclusion mask - // only opaque instances SHADOW_RAY_INDEX, // Ray contribution to hit // group index (aka ray type) HIT_GROUP_STRIDE, // Multiplier for geometry // contribution to hit group index // (aka the number of ray types) SHADOW_RAY_INDEX, // Miss shader index ray, payload); return payload; }
The following diagram shows the workflow for shadow rays:
Note that some hardware does not support ray recursion, but you can use a loop in the ray generation shader instead.
Miss shader is executed if no intersections were found.
As an input, the miss shader takes only editable ray payload:
[shader("miss")] void main(inout PrimaryRayPayload payload)
Miss shader for primary ray generates the sky color.
Miss shader for shadow ray just writes 1.0 into the payload to indicate no occulsion.
An intersection shader can be used with procedural geometry only. For a triangle geometry, built-in hardware accelerated intersection test is used. Intersection shader is executed for each ray that intersects with the AABB. Note that depending on the implementation, the intersection shader may
be executed even if the AABB is occluded by another geometry, so the intersection test should be as fast as possible. You also need to be very careful if an intersection shader has any side effects such as writing data to an UAV.
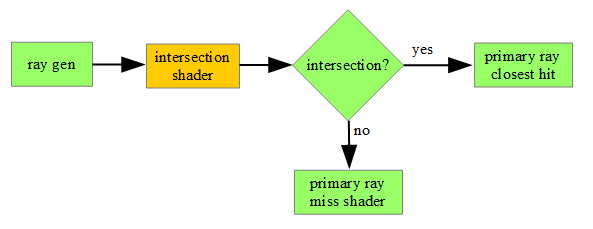
Intersection shader does not have any inputs or outputs.
[shader("intersection")] void main()
We don't have any information about the intersection, so we need to use the same AABB which was specified when building the BLAS and calculate the intersection point in the shader.
If there is an intersection, we report the hit to the system using the ReportHit() intrinsic function:
ProceduralGeomIntersectionAttribs attr; ... ReportHit(hitT, RAY_KIND_PROCEDURAL_FRONT_FACE, attr);
Ray tracing API consists of a number of components which may not be straightforward to grasp immediately. Diligent Engine facilitates the development of ray tracing applications by providing an intuitive API that connects the components using human-readable names and takes the burden of hiding the specifis of the underlying implementation. A readed is encouraged to download the sample application to experiment with it and see these components in action.
Few topics such as Fresnel equations, soft shadows and light dispersion were left out of the scope of this article. Please take a look at the sample source code for details.
Credits go to Andrey Zhirnov for adding ray tracing to Diligent Engine and implementing the ray tracing tutorial, whose description this article is based on.
DXR specification
GLSL ray tracing extension
Tips and Tricks: Ray Tracing Best Practices
Best Practices: Using NVIDIA RTX Ray Tracing
Read more about:
Featured BlogsYou May Also Like





